Preparación autónoma de sitios y plantación de árboles para una bioeconomía sostenible
Propósito y mensaje central
El artículo presenta el concepto Autoplant: un sistema de regeneración forestal autónomo para condiciones boreales (Suecia) que integra planificación de regeneración y rutas, navegación autónoma, preparación de sitio de alta precisión, gestión automática de plántulas, planificación de movimiento de grúa/brazo y verificación fotográfica post‑plantación. El mensaje central es bioeconómico: acelerar y mejorar la regeneración reduce el tiempo en que las áreas cosechadas son fuente neta de carbono, aumenta el secuestro en biomasa y permite mayor disponibilidad futura de madera para sustituir materiales y combustibles fósiles, con menor impacto ambiental y mejor seguridad laboral.
Principales cifras y estadísticas
- Plantación en Suecia: 99% se realiza manualmente; hay dificultad creciente para conseguir mano de obra para esta tarea.
- Impacto del método tradicional: preparación mecánica (mounding/disc trenching) afecta 17–70% del área de un claro (clearcut).
- Umbral ecológico de precisión: para reducir daño por gorgojo del pino (Hylobius abietis) se considera suficiente perturbar ~3% del área, garantizando ~20 cm de suelo mineral alrededor de la plántula.
- Resultado ambiental clave del concepto: Autoplant reduce disturbio del suelo desde ~50% (disc trenching) a <3% (precisión).
- Integración y prueba de campo: demostración a escala real de un ciclo autónomo de preparación y plantación en septiembre de 2022, 1,5 años después del inicio del proyecto; la integración fue exitosa pero con pocas plantaciones completadas en los dos días por interrupciones (modelo de despeje de grúa mal configurado y sobrecalentamiento de un computador).
- Dispositivo de preparación/plantación (Planter): prototipo compacto de ~200 kg que combina escarificación + plantación en 11 s por ciclo (prueba de concepto).
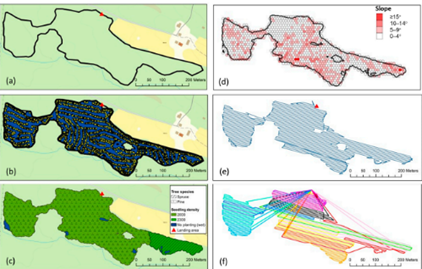
- Planificación operativa (Pathfinder): caso de prueba con área bruta 8,4 ha; área neta cosechada 8,1 ha; área a plantar 8,0 ha. Recomendación: 7,1 ha con pino silvestre a 2.000 pl/ha y 0,9 ha con abeto a 2.300 pl/ha; total 16.200 plántulas.
- Ruteo: ruta continua 15,0 km (2,3 km sin plantar). Con capacidad 1.500 plántulas por carga: 14 rutas; distancia total 19,4 km (6,7 km sin plantar).
- Detección de obstáculos: sistema YOLOv7 con mAP=0,80 (IoU 0,5) para tocones/piedras visibles.
- Tiempo por plantación (prueba controlada): promedio 84 s por plantación; operaciones paralelas ahorran ~7,5% del tiempo total.
- Simulación de interacción máquina‑suelo: piedras con estonidad 20% o 40% y 14% del área cubierta por tocones/raíces; distancia mínima entre plántulas 2,0–2,4 m; densidad lograda 1.500–2.300 pl/ha; disturbio del suelo <3% en todos los casos.
Principales conclusiones del documento
- La precisión es la palanca: es posible reducir drásticamente el disturbio del suelo (hacia <3%) manteniendo densidades operativas (1.500–2.300 pl/ha), lo que mejora co‑beneficios ambientales (suelo, cultura, recreación, ganadería de renos) sin sacrificar la regeneración.
- El cuello de botella no es solo técnico: la productividad debe compensar costos de capital/energía; el sistema requiere brazos más rápidos que una grúa convencional para posicionar el Planter y aumentar plantaciones/hora.
- La autonomía mejora seguridad y trabajo: elimina vibración corporal completa asociada a conducción off‑road y permite modelos de tele‑operación o supervisión de múltiples máquinas por un operador.
- La digitalización habilita silvicultura de precisión: registrar coordenadas exactas de plántulas puede alimentar un ‘gemelo digital’ del bosque, mejorando decisiones de raleo, fertilización de baja dosis y protección de material genético mejorado.
- Persisten barreras para escalamiento: robustez de sensores (polvo, vibración, clima), detección fina de obstáculos, base de máquina comercial adecuada, costo vs velocidad, logística de plántulas y cambios regulatorios (geofencing vs cercas físicas).
Recomendaciones (impacto/relación sectorial con bioeconomía, economía forestal y madera)
- Priorizar MRV de disturbio y supervivencia: evaluar desempeño del Planter (sobrevivencia/crecimiento) vs plantación manual; reportar disturbio real (<3%) como indicador ESG y de integridad ambiental.
- Acelerar el ‘actuador’ de plantación: reemplazar grúa por brazo(s) rápido(s) o múltiples unidades Planter; aumentar plantaciones/hora para lograr bancabilidad.
- Robustez de sensores y fusión de datos: diseñar paquetes de sensores resistentes a polvo/vibración y usar fusión + filtrado para mejorar detección de obstáculos y tamaño/posición.
- Optimizar logística de plántulas: rediseñar bandejas/embalaje y sistemas de carga para mecanización; la capacidad de 1.500 plántulas es referencia útil, pero se requiere eficiencia en recarga y manejo.
- Escalamiento con planificación digital: usar Pathfinder y rutas tipo TSP/VRP para reducir U‑turns, distancia y combustible; transferible a escarificadores y plantadoras no autónomas.
- Regulación y seguridad: promover marcos de operación autónoma con geofencing y detección de personas/fauna, evitando cercado físico costoso.
- Conectar autonomía con bioeconomía circular: integrar regeneración rápida con cadenas de madera de alto valor (madera estructural/ingenierizada) para maximizar sustitución de materiales intensivos en carbono.
Fuente
Hansson, L.J. et al. (2024). Forests 15(2):263. doi:10.3390/f15020263.
Puedes descargar el documento completo
Share this content:
